
- PDF:PDF版をダウンロード
- DOI: https://doi.org/10.15108/stih.00334
- 公開日: 2023.07.12
- 著者: 鎌田 久美
- 雑誌情報: STI Horizon, Vol.9, No.2
- 発行者: 文部科学省科学技術・学術政策研究所 (NISTEP)
ほらいずん
海外技術情報
「知能ロボットとシステムの国際会議2022」概要報告
「知能ロボットとシステムの国際会議2022」(以下、IROS2022)は、2022年10月23日から27日まで、京都国際会館(京都府京都市左京区宝ヶ池)で開催された。
IROS2022のテーマは、「Embodied AI for a Symbiotic Society(共生社会に向けた身体性AI)」と題して、人工知能、ビッグデータ、インタラクション(人と機械の相互作用)等をテーマとした研究成果が発表された。
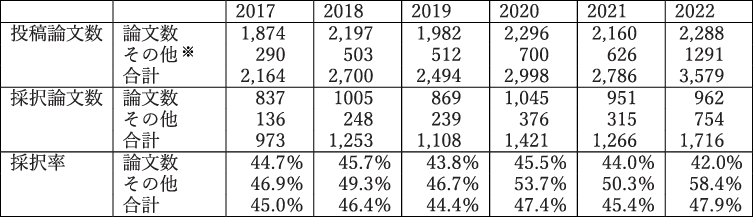
今回の発表件数は、投稿論文数は2,228件、採択論文数は962件、採択率は42.0%であった。各国の投稿論文数及び採択論文数の割合別の順位は、第1位が米国、第2位が中国、第3位がドイツ、第4位が日本、第5位が英国、第6位が韓国、第7位がイタリア、第8位がカナダとなっていた。発表内容は、特別講演、本講演、基調講演、35 周年記念フォーラム、特別フォーラム、レギュラーセッション、ロボットコンペティション等が行われていた。論理とデータ、知識と知恵を身に着けた、現実世界への適応性の高いサービスロボットや産業用ロボット、自動運転車等の研究が進められていた。
キーワード:身体性AI,人工知能,インタラクション(人と機械の相互作用),知能ロボット
1. はじめに
「知能ロボットとシステムの国際会議(IROS/アイロス/IEEE RSJ International Conference on Intelligent Robots and Systems)」(以下、IROS)は、1989年に日本で始まり、これまでに日本に於いて9回開催されている。現在、「ロボット工学とオートメーションに関する国際会議」(ICRA/アイクラ/IEEE International Conference on Robotics and Automation)(以下、ICRA)と並びロボット分野のトップカンファレンスと評価されており、世界で最も規模が大きく、質の高い論文が集まる国際ロボット会議の一つである。
「知能ロボットとシステムの国際会議2022」(以下、IROS2022)は、2022年10月23日から27日まで、京都国際会館(京都府京都市左京区宝ヶ池)で開催された。
IROS2022のテーマは、「Embodied AI for a Symbiotic Society(共生社会に向けた身体性AI注)」と題して、人工知能、ビッグデータ、インタラクション(人と機械の相互作用)、ラーニング(学習)、ビジョン(映像)、オートメーション(自動化)、プランニング(計画)、ハプティクス(触覚フィードバック)、マニピュレーション(操作)、把持、マッピング(地図生成)、モデリング(模型生成)、運動学、コラボレーション(協力性)、推論、ロボティクスシステム、可動性等をテーマとした研究成果が発表された。
今回の発表件数は、投稿論文数は2,228件、採択論文数は962件、採択率は約43%であった(図表1)。各国の投稿論文数及び採択論文数の割合別の順位は、第1位が米国、第2位が中国、第3位がドイツ、第4位が日本、第5位が英国、第6位が韓国、第7位がイタリア、第8位がカナダとなっていた。
今回、日本は開催国として、馬書根氏(立命館大学・日本)が総合委員長、中内靖氏(筑波大学・日本)がプログラム委員長を務めた。新IROSフェローに福田敏男氏(名古屋大学・日本)が選出された。
プログラム内容は、特別講演が1件、プレナリーセッション(本講演)が3件、基調講演が15件、35周年記念フォーラム、特別フォーラムが4分野(エンジニアフォーラム、産業フォーラム、倫理フォーラム、ビッグチャレンジフォーラム)、ワークショップとチュートリアルが43分野、レギュラーセッションが962件、ロボットコンテスト(WRS)、展示会、等となっていた。
2. 発表内容
発表内容は、特別講演、本講演、基調講演、35周年記念フォーラム、特別フォーラム、レギュラーセッション、ロボットコンペティション等が行われていた。
2-1 特別講演
「学会と自治体の連携によるCOVID-19パンデミックの克服」長尾美紀氏(京都大学・日本)
京都大学(医学部付属病院)では、COVID-19のパンデミックによって、日本の医療機関における分子診断システムの弱点、新興感染症に対する医療提供体制や感染予防専門人材の不足など、様々な課題が明らかになったことから、京都市、大阪府、関連病院とCOVID-19対策に関する包括協定を締結し、COVID-19検査や感染対策における協力関係を構築してきた。最初に、大量検査のための大規模分子診断システムを構築し、高齢者施設における感染対策の支援を行った。又、自治体の能力を超える検査を実施し、京都大学付属病院だけで全国の全ゲノム解析件数の約20%を占める全ゲノム解析を行った。次に、京都市保健所と京都大学が連携して保健所の濃厚接触者調査をデジタル化し、COVID-19症例の発見から隔離解除までを一元管理できるアプリを開発した。
2-2 本講演
①「マイクロロボット・ナノロボット」ブラッド・ネルソン氏(スイス連邦工科大学チューリッヒ校(ETH・Zurich)・スイス)
スイス連邦工科大学は、外部生成による磁場と磁場勾配を持つ生体適合性磁気複合材料を使用した、マイクロロボットの移動に必要な磁場と磁場勾配を生成する磁気ナビゲーションシステムの開発を、多国籍企業等と進めており臨床分野に応用している。20年以来、マイクロロボットとナノロボットは大きな進歩を遂げてきており、進歩の多くの要因は材料の選択、加工、製造にあり、近年、生体適合性と生分解性を持つマイクロロボットとナノロボットの開発の道筋が明らかになりつつある。
②「視覚障害者のためのスーツケース型ナビゲーションロボット」浅川智恵子氏(IBM、CMU・カーネギーメロン大学、日本科学未来館 米国・日本)
浅川氏は、目の不自由な人のための「スーツケース型ナビゲーションロボット」に関する研究について発表された。
視覚障害者の歩行には「白い杖」が使われているが、視覚障害者は「白い杖」からの触覚情報や周囲の音などの情報に依存している状況にあり、一人で探索しながらの歩行時には多くの困難に直面することが多い。一方、最近の人工知能技術やロボット工学などのテクノロジーは、視覚情報を非視覚媒体に解釈し、公共空間において安全で社会的に準拠した方法で視覚障害者を導くための新しいソリューションを提供することが可能となりつつある。
今回の発表において、「白い杖」や「盲導犬」に代わる新しい手法として、人工知能技術やロボット工学によるスマートな「スーツケース型ナビゲーションロボット」が紹介された。周囲の強力なサポートがあって実現した、明るい未来を印象付ける感銘を受けた発表であった。

空港やショッピングモールなどの実環境において、スーツケース型ロボットが人を誘導することが実現されている。
2-3 基調講演
①「ヒューマンロボットインタラクション予測制御」アラシュ・アジョウダニ氏(イタリア工科大学研究所所長・イタリア)
イタリア工科大学では、予測的人間モデルと自律型ロボットコントローラを効果的に統合して、人間とロボットの相互作用及び協力によって、幅広い問題に対応できる研究が進められている。同じ作業空間において、人とロボットが安全に共存するように設計し、人間の苦痛やニーズを認識し、理解し、対応できるような、人間中心の協調ロボットシステムの構築を試みている。
②「スケーラブルな自律性に向けて」アレクサンドラ・ファウスト氏(Google Brainシニアリサーチサイエンティスト・米国)
Google Brainでは、ナノUAV(無人航空機)での完全自律ナビゲーション、人間エージェントが行う意思決定方針の自動化などの、実際の作業環境における複雑なタスクを実行する自律エージェントの開発が進んでいる。同時に、システム訓練には、強化学習と自律性が重要となるとの考えのもとに研究が進められている。
③「AI―科学的発見のためのロボットシステム・ロボット技術の役割」原田香奈子氏(東京大学(CDBIM)准教授・日本)
東京大学CDBIMでは、個体差のある小さく壊れやすい試料に対して、自律的に科学実験を行うことができるAIロボットシステムの開発を目指している。AIロボットシステムが自律的に科学的仮説を立て、身体を動かすための戦略を立て、サンプルの操作を行い、サンプルの反応を観察・解釈し、循環ループで新しい仮説を生成する研究を進めている。
④「人々のための群れ」ザビーネ・ハウエルト氏(英国ブリストル大学准教授・英国)
プリストル大学では、機械学習による適切なエージェントの設計、デジタル世界と物理世界の間をシームレスに移動するデジタルツイン、安全で信頼できる統一されたフレームワークの構築を目指している。高度なマイクロロボットは、メモリ、計算、通信を備えた大型ロボット群の動作を達成できる可能性がある。
⑤「感覚運動制御と外科用ロボット工学の出会い」イラナ・ニスキー氏(ネゲブ・ベン=グリオン大学・イスラエル)
ネゲブ・ベン=グリオン大学では、ロボット支援低侵襲手術(RAMIS)や遠隔操作アプリケーションにおいて、仮想物体と現実物体で外科的タスクを実行する際の人間の運動学的特徴、スキル習得後の異なる時間での変化、手術ロボットの制御、手術スキルの評価と進歩、そして最終的には患者の幸福を改善するかについての研究が進められている。
⑥「ロボット機構の発明」多田隈建二郎氏(東北大学 准教授・日本)
東北大学では、オムニボール(全方向性メカニズム)の性能を改善する研究を進めている。オムニボールを縦方向に円筒状に伸ばすことで、不整地で全方向移動を可能にするオムニクローラを実現している。円筒形状を内外膜運動のトーラスに変換することで、濁った水中でのロボットの移動及びオムニクローラからオムニグリッパーへのさらなる移行が可能になっている。また、自己修復材料と組み合わせることで、能動的な自己修復特性を持つロボットを実現している。
⑦「ロボット支援遠隔低侵襲手術:5GとAIの融合」シュシン・ワン氏(天津大学教授・中国)
天津大学では、遠隔手術を補助できる低侵襲手術ロボット「マイクロハンド」の開発を進めている。現在、中国の国家医療製品管理局の承認を得ており、遠隔臨床試験が実施されている。
⑧「人工筋肉の進歩とその応用」チョウ・ケイ・チャン氏(精華大学 准教授・中国)
精華大学では、長寿命・高出力密度の誘電エラストマー人工筋肉の新しい形状、モデル、作製、設計手法の開発に注力しており、コーネル大学、ハーバード大学と共に共同研究を進めている。ソフトロボティクスのための誘電エラストマーは、柔らかい材料の厚さを通して印加された電圧が大きなひずみを生成し、筋肉のような応答時間で大きなエネルギー密度を示すため、多くのソフトロボットアプリケーションとして注目されている。
⑨「スマート流体デバイスを備えたウェアラブルロボット」モダール・ハッサン氏(筑波大学・日本)
筑波大学では、デバイスの機能と構造、筋トレーニングデバイス、ロボット足首足装具、バックサポート外骨格への応用研究が進められている。
ウェアラブルロボットは、人間の身体機能を増強し、筋骨格系疾患患者の身体リハビリテーションを支援し、身体障害者の生活を向上させる可能性を秘めている。磁気レオロジー(MR)流体は、磁場に応じて見かけの粘度を変化させることができるスマートな材料であり、その高速応答時間と高い材料性能により、ウェアラブルロボットで特に有望となっている。
2-4 35周年フォーラム
IROSの35年間の成果を紹介するフォーラムが開催された。自律システム、支援ロボットとソーシャルロボット、ロボット工学と女性科学者、ロボットの研究開発の最前線等が発表された。
2-4-1 自律システム
◇「基本的な飛行能力から自律ナビゲーション及び飛行中の相互作用まで」ローランド・ジークワーク氏(スイス連邦工科大学(ETH)チューリッヒ校教授・スイス)
スイス連邦工科大学では、飛行ロボットの設計と自律ナビゲーションに焦点を当て、連続飛行用のソーラー飛行機から、垂直離着陸と固定翼飛行の効率を組み合わせたハイブリッドコンセプト、全方向性でインタラクティブなマルチコプターまで、飛行システムの革新的な設計を実現している。GPSが拒否された環境での視覚的及びレーザーベースのナビゲーション(ローカリゼーション、マッピング、計画)の研究が進められている。
2-4-2 ロボットの研究開発の最前線
◇広瀬茂男氏(極限環境ロボット研究所 HERO Lab.所長・東京工業大学名誉教授・日本)
広瀬茂男氏は、ヘビ型ロボット、4足歩行ロボット、地雷探知除去ロボットなど、多くの先駆的な研究を行い、独創的なロボットやロボット技術を開発している。特に、1972年完成させた「ヘビ型ロボットACMⅢ」が非常に有名である。当時、ヘビ型ロボットの研究をしているのは広瀬氏だけで非常に注目された。
モチーフにヘビを選んだ理由は、細長くしなやかな動きをするロボットを作ることができれば、災害救助や配管点検などさまざまな用途に役立てられるのではないかという工学的な期待があったからとのことである。
2004年には、極限環境ロボット研究所 HERO Lab.が設立された。東京工業大学発のロボットスタートアップであり、AIを搭載した遠隔操作ロボットを開発し、汚れた、危険な、要求の厳しい作業環境から人間を守ることができるロボットを開発している。インフラ点検用ロボット、福島第一原発のための数々の廃炉用ロボットの開発など、「役に立つロボット」の開発を続けている。
◇マーク・ライバート氏(ボストンダイナミクス、前MIT・CMUコンピュータサイエンス・ロボット工学教授・米国)
ボストンダイナミクス(米)は、ロボット研究開発を行っている企業であり、1992年、MITでロボットと人工知能の研究をしていたマーク・ライバート氏により設立された。
マーク・ライバート氏は、人型ロボット「アトラス」、犬型の4足歩行ロボット「スポット」、商用物流ロボット「ストレッチ」などの世界で最も先進的なロボットを作成する会社であるボストンダイナミクスの創設者兼会長である。
マーク・ライバート氏は、ロボットを創ることが大好きで、敏捷性、器用さ、知覚、知性を持って動く動物の驚くべき能力に触発されて、人間及び動物と同じことができるロボットの実現を目標としてきた。ロボットの重要な要素である、バランスと動的機敏性、移動中の操作、移動中の知覚を身に着けた、実世界での有効性と汎用性に貢献する動的な動作ができるインテリジェンスロボットを開発している。
インテリジェンスロボットの実現には、コグニティブインテリジェンスが必要となってくる。コグニティブインテリジェンスとは、与えられた情報を機械的に情報処理するだけではなく、人間のように状況を理解し、現場を見て実践から学習し、常識を働かせて、計画、推論を行い、高度なコミュニケーションを実践する、拡張的な認知知能システムである。この知能は、ロボット開発に必要とされている知能である。
ロボット開発におけるベストな研究体制は、企業と大学が協力して研究を進めていくことが必要であるとの指摘があった。両者の研究体制においては人工知能研究機関が必須となり、大学には、基礎的思考、新しい未来志向のアイデア、先端技術、公開性と協力体制が求められており、企業には、チームワーク、経験豊かな研究開発者、システムエンジニアリング、大規模プロジェクトが求められる。
2-5 特別フォーラム
2-5-1 インダストリーフォーラム(産業部門)
①トヨタフロンティアセンター(日本)
トヨタフロンティアセンターは、実空間においてより具体的な問題に対応できる知能ロボットや自動運転車の研究開発を行っている。人工知能(AI)と人工経験(AE)の融合による、論理とデータ、知識と知恵を身に着けた適応性の高いロボットや自動運転車の開発が進められている。
人工知能(AI/Artificial Intelligence)は、人間の脳の認知・判断などを人間の脳の仕組みとは異なる仕組みで実現する技術で、人間の脳の代替に近いイメージで認知されており、コンピュータが人間のように学習し、その知識をもとに結果を推測することが求められている。人工経験(AE/Artificial Experience)は、作り物の体験を意味する言葉で、人工知能の発展を考えるうえで重要となると考えられている。知識(AI)と経験(AE)を組み合わせることで、初めて知恵が生まれ、より適応性がある人工知能が生み出される。人工知能は経験から学び、新たな入力データに順応することで、人間が行うように柔軟に判断できるようになる。現在、AIとAEを融合した研究が進められている。機械学習とデータ駆動型技術によって、ロボットは人工経験を実現できる。それらの経験データを学習することによって、人工知能が実用化レベルに達することが期待されている。
②MUJIN(むじん)(日本)
MUJINは、物流・製造現場における重労働や単純作業の代替を可能とする、知能を持つ産業用ロボットの開発に取り組んでいる、2011年創業の日本発のベンチャー企業である。
MUJINは、人力で行わざるを得なかった物流や製造現場における重労働や単純作業を、知能ロボットで自動化する世界唯一のプラットフォームを提供している。独自の高度なロボット知能化技術「MujinMI」により、自律的に考えて臨機応変に動く「MujinRobot」を開発しており、人間が作業を教えなくても、目で状況を把握し、胴体を動かし、手で細部まで注意を払いながらモノを掴んでそっと運搬するなど、ロボットが自分で必要な動作を考えることが実現している。
2-6 レギュラーセッション
レギュラーセッションは、セッションは108件、採択論文数は962件であった。
セッションでは、アワードセッション、マニピュレーションシステム、空中システム、医療用ロボットシステム、ローカライゼーション、動作とパスプランニング、生物学に触発されたロボティクス、スラム、ナビゲーションシステム、強化学習などを中心とした発表がされていた。
2-7 ロボットコンペティション
ロボットコンペティションは、対話ロボットコンペティション、未来コンビニチャレンジトライアルコンペティション、ロボット把持・操作コンペティション、サイバースペースにおけるインタラクティブサービスロボットコンペティション等が開催された。
■WRS(World Robot Summit/ワールドロボットサミット大会)未来コンビニチャレンジトライアルコンペティション
ワールドロボットサミット(World Robot Summit)は、経済産業省や新エネルギー・産業技術総合開発機構(NEDO)が主催する、ロボット競技会の一つである。競技は「ものづくりカテゴリー」「サービスカテゴリー」「インフラ・災害カテゴリー」「ジュニアカテゴリー」の4種目で競う。
未来コンビニチャレンジトライアルコンペティションは、コンビニエンスストアにおける商品の在庫や期限切れ品の回収を自動化する技術の開発を目的としたコンテストである。参加者は、これらの作業を自律的に動かして実行するロボットシステムと、コンビニエンスストア内に設置する必要があると思われるインフラストラクチャを開発し、開発したロボットとインフラストラクチャを使用して、コンビニエンスストア内で在庫と廃棄のデモンストレーションを競う。実際には人間の様にスムーズには動いておらず、商品を掴むことが上手くできていない状況にある。

3. その他
3-1 受賞者
IROS2022の主要受賞部門は15部門あり、国別の受賞者数は、米国6件、ドイツ2件、韓国2件、英国1件、オランダ1件、カナダ1件、スイス1件、該当なし1件であった。
日本からは、福田敏男氏(名古屋大学名誉教授)が新IROSフェローとして選出された。
福田氏は1989年のIROSの創始者である。
- 新IROSフェロー
福田敏男氏(名古屋大学・日本) - 原島革新的技術賞
クオン・ドンス氏(韓国科学技術院・韓国) - 福田敏男若手プロフェッショナル賞
ジュゼッペ・ロイアンノ氏(ニューヨーク大学・米国) - ABB最優秀学生論文賞
「ダイナミック可視性アップデートを使用した高速で試行可能なルートプランナー」
ヤン・ファン氏(カーネギーメロン大学・米国) - IROS2022論文賞
「衣服の効率的な両手折りたたみ学習」
ヤハヴ・アビガル氏(カルフォルニア大学バークレー校・米国) 他
■その他
日本からの受賞は該当しなかったが、下記の参加チーム(2件)が最終選考に残った。
- ◇「無限自己ひねり機能を持つ1自由度ロボットグリッパー」西村斉寛(金沢大学)、松本翼(金沢大学)、浅間義達(パナソニック)、池内宏樹(パナソニック)、豊島亮(パナソニック)、渡辺哲陽(金沢大学)
- ◇「高精度産業用コネクタ挿入のための触覚感度ニュートンVAE」奥村亮(パナソニックホールディングス)、西尾信樹(パナソニック)、谷口忠大(立命館大学)
3-2 スポンサー
IROSへの出展は、学界や産業界のロボット工学の世界的リーダーに宣伝するための最も費用対効果の高い方法であり、業界のパイオニアとのつながり、ターゲットとする潜在的な顧客を獲得する機会となる。スポンサーは出資金に応じて、ブースの提供、広告欄の提供、大会中の企業ビデオの放映権、産業フォーラム代表の資格等が得られる。出資金額は、ダイヤモンドが500万円、プラチナが300万円、ゴールドが180万円、シルバーが120万円、ブロンズが50万円、その他(ブースのみ)が30万円となっている。
- ダイヤモンド(1件)
ソニー(日) - プラチナ(4件)
TII(唖)、LIONSBOT(新)、VisionNavRobotics(米)、極限環境ロボット研究所 HERO Lab.(日) - ゴールド(9件)
THK(日)、三菱電機(日)、MECH MIND(中)、KUKA(独)、woven planet(日)、amazon(米)、DUBAI FUTURE LABS(唖)、Khalifa University(唖)、ROBOTIS(韓) - シルバー(8件)
MUJIN(日)、トヨタ自動車(日)、本田技研工業(日)、APPTRONIK(米)、Intelligence&Robotics(中)、CREARPATH(加)、ZEBRA(米)、OUSTER(米)
4. まとめ
IROS2022のテーマは、「Embodied AI for a Symbiotic Society(共生社会に向けた身体性AI)」となっており、ロボットとAIを融合した研究が進められていた。ロボットの知能化の実現には、コグニティブインテリジェンス、人工知能(AI)と人工経験(AE)を融合した研究開発が重要となっており、論理とデータ、知識と知恵を身に着けた、現実世界への適応性の高いサービスロボットや産業用ロボット、自動運転車の研究が発表されていた。
注 <身体性AI>人間は、外界の環境と相互作用を持つ身体によって知覚や体験を得ることができ、そこからも学ぶことで高度な知能を獲得していくことが可能だと考えられる。一方、現状のコンピュータや人工知能は、人間と同じような身体が存在しないので、人間と同じようには知能を獲得できない、という点が課題となる。
