
- PDF:PDF版をダウンロード
- DOI: https://doi.org/10.15108/stih.00279
- 公開日: 2022.03.01
- 著者: 岡谷 重雄、鎌田 久美
- 雑誌情報: STI Horizon, Vol.8, No.1
- 発行者: 文部科学省科学技術・学術政策研究所 (NISTEP)
ほらいずん
理化学研究所(関西文化学術研究都市)見学インタビュー
ガーディアンロボット試作機第1号「ぶつくさ君」の開発
-人がこころを感じるロボットの実現を目指して-
科学技術予測・政策基盤調査研究センター 研究員 鎌田 久美
国立研究開発法人理化学研究所(理研)では、人とAI・ロボットが柔軟に共存する未来社会に向け、心理学、脳科学や認知科学とAI研究の強みを相乗的に取り入れた次世代(「脳×AI」)ロボットの社会実装に向けた研究開発「ガーディアンロボットプロジェクト」を推進している。このプロジェクトでは、人に寄り添い、人をさりげなく支援するロボットの実現を目指した研究が進められており、高齢化社会における介護や労働者不足等の課題を解決するための人と共生する知能ロボットの開発が期待されている。今回、関西文化学術研究都市にある理化学研究所を訪問し、開発中のロボットを見学して、プロジェクトリーダーの美濃導彦氏(以下、美濃PL)及び開発担当の研究者に目指すロボット像について伺った。
キーワード:ガーディアンロボットプロジェクト(GRP),脳型AI,感情コミュニケーション,自律走行,分散協調
1. ガーディアンロボットプロジェクト
国立研究開発法人理化学研究所が推進しているガーディアンロボットプロジェクトでは、人に寄り添い、人が「こころ」を感じる自律的なロボットの開発を目指している。今までのロボット開発における課題は、人間の命令に基づいて限られたタスクをこなすものがほとんどであり、ロボット自身がおかれた環境や支援すべき人間の状態を自ら認識し、周囲の情報を収集し、自らの目的に沿って行動するための自律機能が欠けていたことにある。現在、国内外の大学・研究機関等において、人と共生する知能ロボットの開発が進められている中で、自律機能を解明し、実際に構成することでロボット開発や人工知能のブレークスルーを目指す、理研のガーディアンロボットプロジェクトについて、美濃PLにお話を伺った。
「理化学研究所が進めているガーディアンロボットプロジェクトでは、人に寄り添い、人が『こころ』を感じる自律的なロボットの開発を目指しています。最近のロボット研究では、目的特化型の配膳ロボットや案内ロボット、ヒト型ロボット、ダンスを踊るロボット、アンドロイドなどの研究が進んでいますが、将来的には人と共存するロボットが主流になると言われています。人とロボットがコミュニケーションするには、時と場所を共有することが必要となります。この状況では、人とロボットは同じものを見ていますので、ロボットに認知機能を作り、その認知機能に基づいてコミュニケーションができるようなロボットを作ることができます。
自律的なロボットの実現には、パターン認識、記号と意味の問題(シンボルグラウンディング)、コモンセンスなどの問題を解決していく必要があります。コモンセンスについては、常識を知識として表現するプロジェクトが進められていますが挑戦的な分野です。また、機械学習と人間の学習は違うので、この問題を解決する必要があります。
ガーディアンロボットプロジェクトでは、主体性を持つ自律的なロボット(1人称的な主体を持つロボット)を作りたいと考えています。主体性とは、入力された多くのデータの中から、必要なデータを選んで、どのように処理するかを決定するものです。主体的にデータ処理を行い、一貫した選択基準に基づいて行動する、論理的に一貫性を持つような新しいロボットを目指しています。さらに、主体性を持つロボットが自らデータを選ぶことは、ロボットの個性につながると考えています。
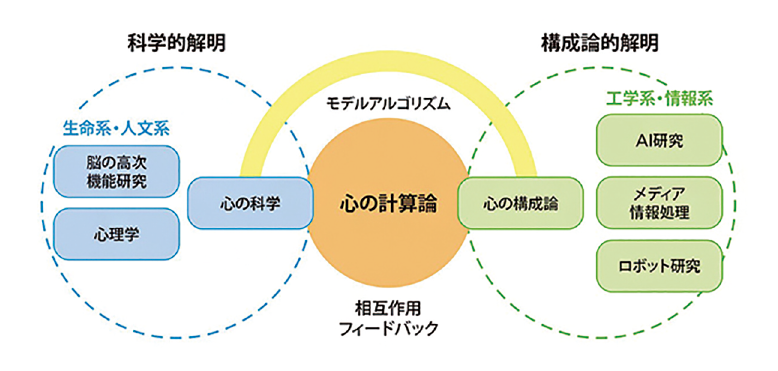
このようなロボットを実現するために、こころの計算論に基づくロボティクスの研究を進めています。人間の認知機能を中心とするこころ(認知、記憶、思考、運動、感情、社会性)のメカニズムを計算論的に解明して、ロボットの実装を通じて構成論的に実証することを目指しています(図表1)。
社会に役立つロボットという視点では、人間の意図や感情を推定して、日常生活において、人間をさりげなく支援するロボットを作りたいと考えています。命令に従うだけのロボットにならないように、その人のためになるロボットを作りたいと考えています。もしかしたら、憎たらしいロボットになるかもしれません。しかし、それが主体性を持つことの意味であると思います。
言うことを聞くだけのロボットは人にとっての道具にすぎません。すぐに飽きてしまいます。主体性のあるロボットであるならば、ペットのように、人間のパートナーになるロボットができるのではないかと考えています。具体的には、高齢者の話し相手ができるロボット、リハビリを支援するロボットなどを目指しています。」
2. 研究チーム構成及び研究開発ロボット
研究チーム及び研究開発ロボットについて、美濃PLより御紹介を頂いた。
「研究チームは、以下の6つのチームから構成されています。
- ・知識獲得・対話研究チーム(吉野幸一郎チームリーダー)
- ・心理プロセス研究チーム(佐藤弥チームリーダー)
- ・インタラクティブロボット研究チーム(港隆史チームリーダー)
- ・人間機械協調研究チーム(港隆史チームリーダー)
- ・感覚データ認識研究チーム(川西康友チームリーダー)
- ・動作学習研究チーム(中村泰チームリーダー)
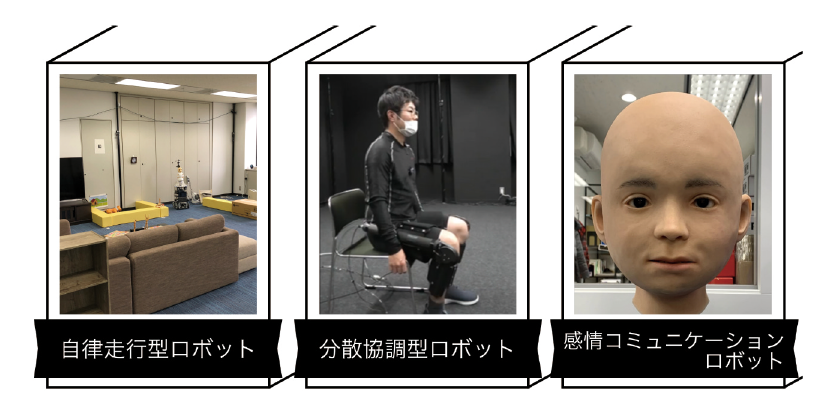
現在の研究開発では、以下の3種類のロボットを中心に開発しています(図表2)。
- ・自律走行型ロボット…認識したことを話すことができるロボット「ぶつくさロボット」
- ・分散協調型ロボット…膝に装着する、膝をサポートするロボット
- ・感情コミュニケーションロボット…言葉に合わせた顔表情ができるロボット
最終的にはこれらの3種類のロボットを何らかの形で合体や協調するような形にしたいと考えています。」
(左から、自律走行型ロボット、分散協調型ロボット、感情コミュニケーションロボット)
3. 脳型AIの全体アーキテクチャ概要
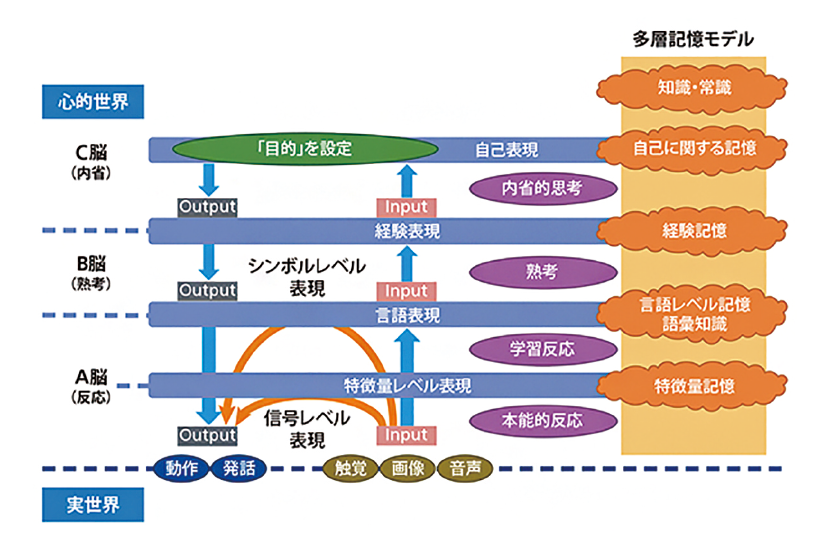
美濃PLは、『ミンスキー博士の脳の探検-常識・感情・自己とは-(著者:ミンスキー)』の中で提案されている「心的活動の階層モデル」を参考に、プロジェクトのアーキテクチャの構想をされている(図表3)。「A脳は、センサーデータをもとに外界を認識し、ロボットが行う動作の前提となる外界に関する知識をB脳に渡すためのアルゴリズム、及び外界に働きかける動作を生成するアルゴリズムです。B脳は、A脳の外界に対する認識、アクションの結果を元に考えて推論し行動を起こす「主体」のアルゴリズムです。さらに、C脳は、実際にロボットが行った動作、その動作を行った環境及びその動作の結果などを記憶して内省し、主体の次の動作プランを修正するアルゴリズムです。言語表現に意味を持たせるには、B脳以上の世界に何か自律的な主体をつくる必要があります。主体にモチベーションを与えるために、まず『目的を与える』ことにしました。そうすれば、目的に沿って知識の活用と行動の方向性を自律的に判断し、決定することができるだろうと考えています。」
4. ガーディアンロボット試作機第1号 「ぶつくさ君」
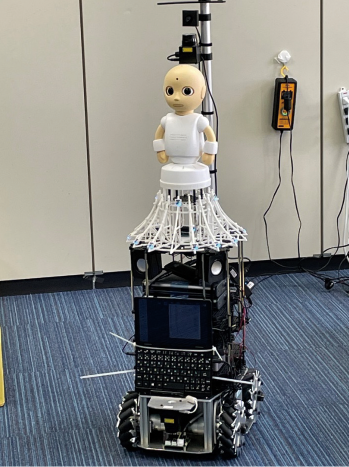
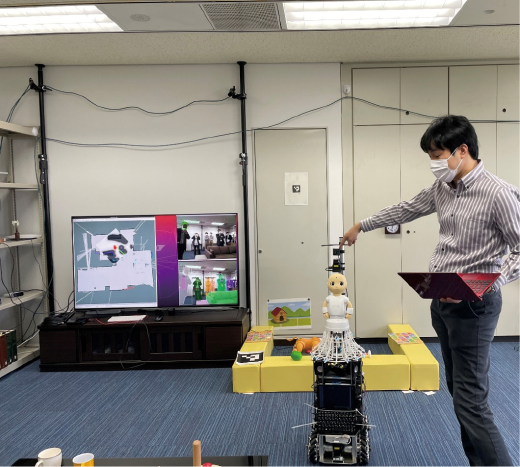
「ぶつくさ君」がいる実験室を見学させていただいた(写真1、写真2)。
実験室に入ると、「ぶつくさ君」が近づいてきたので、こちらから「こんにちは」と声をかけると、「ぶつくさ君」が「スタート地点から移動したよ。港先生がいたよ。ここに来るまでに、知らない人がいたよ。ネクタイ、スマホ、本、マグカップ、ソファ、椅子があったよ。まぶしい、うるさいと感じたよ。」と、答えてくれた。
「ぶつくさ君」は音のする方向を向いて首を振っているが、顔の上のカメラで物体認識をしている。自分の位置を見失ったときには、ぐるりと回って、レーザーレンジファインダで自分の位置を探す。「ぶつくさ君、入り口の様子を見てきてください。」と、吉野チームリーダーが尋ねると、「今、見回りの仕事中なので、自分でお願いします。」との答えがあった。ほほえましいシーンだと思った。
- 目指すロボットについて
「ロボット自身に意図を持たせることを考えています。ロボット自身が見回りをしたいという意図を持っている状況で、ユーザに何かお願いされたとき、どちらを優先するかについてロボット自身が判断できるようにしたいと考えています。この『ぶつくさ君』に、言葉を使ったコミュニケーションができるようにしたい。ロボット自身が意図を持って、説明できるようにしたい。そのような思いで、プラットフォームを作って実験を進めています。」(吉野チームリーダー)
- 「ぶつくさ君」の認識について
「認識した物が何であるかというときに、ぶつくさ君は、全ての物の名前を言いませんでした。これは、認識した物を理解していて選択的に選んでいるのか、それとも、ボキャブラリーが少ないから言えないのか、どちらなのでしょうか。」との質問に対して、「物の認識については、知っているボキャブラリーの中で判断しています。研究室の中には、本棚があるので本が多く認識されています。一方、新しい概念を自分で学習するところまではまだ到達していませんので、研究テーマとしてやっていきたいと思います。ふだんの生活の中で得たものから、自発的に学習するメカニズムを作っていきたいと考えています。」と答えていただいた。
「人の認識についてはどのようになっていますか。」との質問に対しては、「顔認識を行っています。知らない人の認識については、知っている人のどの顔にも近くないことで「知らない」と判断し、知っている人は既に蓄積してある顔画像情報で判断しています。」とのことだった。
「新しいものを認識するためには、どこからどこまでがものが1つのものなのかを認識する必要があります。また、動作についても、どこからどこまでが1つの動作なのかを認識する必要がありますが、切り出すところがとても難しく、研究テーマとなっています。」
- 「ぶつくさ君」の記憶について
「記憶していくためには、どのようなシステムが良いのかを議論しているところです。
ロボット自身は全てを記憶することができるので、記憶するに当たっては、それが自分にとって重要な物なのか、あらゆる物の中から今何が必要なのかを自ら引っ張り出すことが大事と考えています。それが主体性を持って記憶をしていく動作となります。引っ張り出してくるところを記憶するメカニズムと融合して、目的に応じてどの情報をもってくるかを判断するメカニズムの研究を進めています。」
ロボットの自律機能に必要となる「主体性」「目的」「意図」という高次機能、それらを支える様々な要素、外界の認識機能及び記憶機能の実現のために、ガーディアンロボットプロジェクトでは6つのチームが一丸となって、人に寄り添い、人をさりげなく支援するロボットの開発に取り組まれていた。高齢化社会における介護や労働者不足等の課題がある中で、家庭や社会のあらゆる場面において、人と共生する知能ロボットが活躍されることが期待される。今後、バージョンアップした「ぶつくさ君」に期待したい。
(2021年10月18日訪問)
