
- PDF:PDF版をダウンロード
- DOI: http://doi.org/10.15108/stih.00083
- 公開日: 2017.06.25
- 著者: 相馬 りか
- 雑誌情報: STI Horizon, Vol.3, No.2
- 発行者: 文部科学省科学技術・学術政策研究所 (NISTEP)
ほらいずん
筋電義手にみられるものづくりと研究開発の新たな仕組み
「筋電義手」とはソケットなどを介して欠損した上肢の断端に固定し、残存する筋を動かそうとするときに皮膚表面で計測される微弱な電気(以下筋電信号)でその動きをコントロールする電動義手である。我が国ではサリドマイド児の支援機器として、旧厚生省、旧科学技術庁が主導して1960年代から積極的に筋電義手を含む電動の義手の開発が行われた。しかし、当時の技術力では子供が自由に使いこなせるレベルには至らず、製品化されたものの普及率は低かった1)。ところが近年、各種デバイスが高機能化・小型化し、機械学習の進展により筋電信号の処理手法が洗練された結果、軽くて使いやすい筋電義手の開発が可能になった。加えて、3Dプリンタの普及や制御プログラムの公開によってユーザーも参加したオープンな環境での開発も試みられている。本稿では、このような筋電義手にみられる我が国のものづくりと研究開発の新たな取り組みについて紹介する。
1. 筋電義手とは
筋電義手は外観を再現する装飾用義手とは異なり、ロボットハンドに近い外観と機能を持つ場合が多い(図表1)。一般に皮膚に貼り付けた電極から取り出された筋電信号でモーターを制御して様々な動作を行うことができる。 筋電信号は筋の伸展・収縮に応じて生じる微弱な電気で、個人差がある上にノイズが大きいため、モーター制御のシグナルとするには煩雑な信号処理が必要である。そのため、筋電信号の代わりに筋活動に伴う筋の形状変化をセンサで感知してモーターを制御する装置もある注。いずれも、ユーザーの意図の通りに義手を操作するためには練習が必要で、義肢装具士や作業療法士、医師の協力が必要であるが、使いこなせるようになれば、靴のひもを結ぶような両手の動作ができるようになり、使用のメリットは大きい。
しかしながら、現在国内で販売されている筋電義手のほとんどは欧米からの輸入品で、ドイツ、イギリス、カナダの3社でシェアをほぼ占有している。これに対して、近年、国内でも筋電義手の量産を目指した動き2)もみられるだけでなく、⾼機能な筋電義手の研究開発も進む。
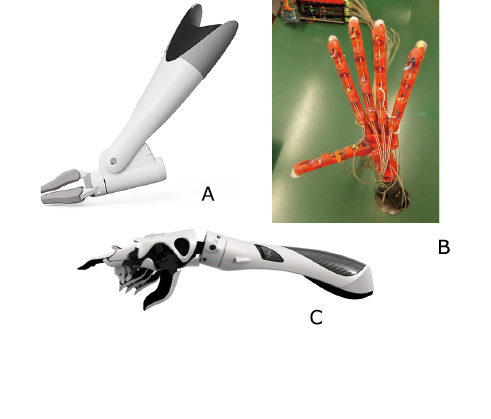
A:ダイヤ工業株式会社、B:株式会社メルティンMMI、C:exiii株式会社提供
2. 我が国における最近の筋電義手開発の特徴
筋電義手の動作に関する技術要素はロボットハンドと共通点が多く、機能の高度化は目覚ましい。研究レベルの義手の中には、豆腐やポテトチップ、ワイングラスなど微妙な力加減が必要な対象はもちろん、液体の入った袋など把握の途中で形状が変化する物の把握・把持もできるものもある。ヒトの把握動作には、ボールをつかむ、紙をつまむ、かばんを持つなど多種多様な種類があるが、既にこれらの多くが筋電義手で実現できる。フライパンを持つ、⾃転⾞に乗るといった程度の握⼒も発揮できる。義手は据置き型のロボットハンドとは異なり、軽量化のためにモーターの大きさや点数を減らす必要があるが、研究者の創意工夫によって様々な動作原理で多様な動きを実現できる筋電義手が提案されている。
動作の制御に関しては、筋電信号の「解釈」がポイントになる。イメージ通りに義手を動かすために、あらかじめユーザーに何種類かの動作をイメージしてもらって生じた筋電信号を機械学習によって動作と対応づけ、モーター出力を制御する。高度な学習が達成されれば、学習していない新規動作も実現でき、意のままに義手を動かせるようになる。できる動作の種類や正確さは義手の機械的要素はもちろんのこと、アルゴリズムに大きく依存する。既に、学習のための待ち時間をほとんど要することなく、2か所の筋電信号から5本指の多彩な動作が意のままに実現できるアルゴリズム3)も実装され、スイスで開催された義手等の機能を競う競技会4)に出場した(図表1B)。
3Dプリンタを活用したデジタルファブリケーション5)も特徴の一つで、低コストで迅速にユーザーごとにカスタマイズした試作品を作ることができる。また、3Dプリンタの利用によって、デザインの自由度が向上し、手の形状との類似を追求するのではなく、こだわりのあるデザインも提案され、一定の評価を得ている(図表1A、C)6)、7)。
デジタルファブリケーションによるもう一つの新しい特徴として、研究・開発・製造のオープン化があげられる。exiii株式会社では、開発した義手(図表1C)の制御部分のソースコード及び基板などの回路データとデザインデータを公開してオープンソース化した。プリンタで作ることができないケーブルやセンサなどはキット化して通信販売した。これを購入し、データをダウンロードして、3Dプリンタで部品を打ち出して組み立てれば(ハンダ付けなどの作業は必要だが)義手を作ることができる。動作させるためにはプログラムをスマートフォンにインストールすればよいという手軽さである。実際既に海外でこの義手を作成し、使用している事例も報告されているという。このような仕組みがうまく機能すれば、ユーザーは低価格で義手を手に入れることができるだけでなく、多くの研究者やエンジニアによるプログラムの改良や、3Dプリンティング用素材に関する情報も得られることから、研究・開発の加速も期待できる。さらに、ユーザーのほか、義肢装具士やリハビリテーションの関係者もニーズのフィードバックなどによって開発に参加でき、多くの関係者が関与したオープンなコンソーシアム型といってもよい研究開発の仕組みが構築できる(図表2)。
株式会社メルティンMMIは、義手本体(図表1B)ではなく筋電センサを販売し、計測された筋電信号をリアルタイムで学習・識別できる環境のクラウド上での提供を開始した。購入者は、この環境を活用して義手に限らず筋電信号で動作する様々な装置を開発できる。クラウド上に集積したデータは、同社が人工知能を用いていわゆるビッグデータ解析を行い、信号処理のさらなる洗練のために活用する。この事例は、多くのユーザーの使用によってその価値を向上させる、いわばプラットフォーム型ともみなせるタイプの研究開発といえる。
3. 今後の展開の可能性
筋電義手の機能高度化は我が国だけのトレンドではない。視覚センサ付き8)や神経と侵襲的に接続して制御・触覚フィードバックができるタイプ9)など高機能な筋電義手に関する研究成果が欧米各国から次々と発表されている。マーケットが大きい中国でもその開発及び普及が急速に進む10)。
一方、直感的な操作によって多様な動作ができ、しかも軽量な筋電義手は、特定の動作目的に特化する産業用ロボットとは異なり、臨機応変に様々な動作を行う「汎用」あるいは遠隔操作用ロボットハンドとしての応用も期待できる。手術、農業、極限環境での使用など、様々な用途が考えられる。
以上、筋電義手の高機能化を、3Dプリンタを活用したデジタルファブリケーション、研究開発のオープン化、人工知能の活用といった、近年話題となっている要素を取り込んだものづくりと研究開発の事例として紹介した。筋電義手を実際に使用する場面では、安全性が最も重要となるが、機能の高度化と安全性のバランスのとれた開発が望まれる。

参考文献
1) 加倉井周一:我が国における電動義手開発と実用化の歴史. 日本義肢装具学会誌 9(4)343-349,1993.
2) 毎日新聞電子版2016年11月25日15時00分「筋電義手 安くて軽量、見た目も本物 国産第1号、量産へ」
3) http://www.uec.ac.jp/research/information/opal-ring/0005620.html
4) Cybathlon2016:https://www.ethz.ch/en.html
5) 蒲生秀典:デジタルファブリケーションの最近の動向−3Dプリンタを利用した新しいものづくりの可能性−.科学技術動向137:19-26, 2013.
6) 2016年超モノづくり部品大賞 健康・バイオ・医療機器分野. 機能性とデザイン性を両立する軽量・安価な電動義手 Finch ダイヤ工業株式会社:http://www.cho-monodzukuri.jp/award/archive/2016/health&medical.html
7) 2015年グッドデザイン金賞. 電動義手HACKberry exiii株式会社2015.:http://www.g-mark.org/award/describe/42160
8) http://www.ncl.ac.uk/press/news/2017/05/handthatsees/#hp-banner
9) http://spectrum.ieee.org/biomedical/bionics/creating-a-prosthetic-hand-that-can-feel
10) 秋山重幸:アジアからの挑戦−中国製筋電義手. Journal of Clinical Rehabilitation.24(2),158-159,2015.
